Intelligent Systems Lecture Notes
28 October 2011 • Markov Models
Outline
- Markov Chain
- Stationary Markov Chain
- Hidden Markov Model
- Localization
- Combining Sensor Information
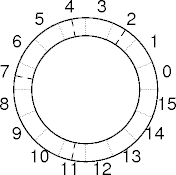
An Agent’s World
- An agent roams a 16-segment circular corridor.
- Segments 2, 4, 7, and 11 have doors.
|
|
|
An Agent's Problem
- The agent can sense doors and lights.
- But the sensors are flakey.
- The agent can move forward or backward one segment.
- But sometimes the agent overshoots by varying amounts, and sometimes it sticks in place.
- The agent starts in an unknown segment, and executes a known sequence
of actions.
- At the end of the actions, in which segment is the agent?
Markov Chain
- A Markov chain is a special belief network:

- Pr(St + 1 | S sub 0, …, St) = Pr(St + 1 | St)).
- St is the state at time t.
- Future states know only about St.
- The past is independent of the future given the present.
Stationary Markov Chain
- If
pr (St + 1 | St) = pr (St + 1' | St') for all t, t' > 0.
- the Markov chain is stationary.
- Specify pr (S0) and pr (St + 1 | St).
- Simple model, easily specified.
- Often the natural model.
- Easily made infinite.
Hidden Markov Model
- A hidden Markov model (HMM) is a belief network:
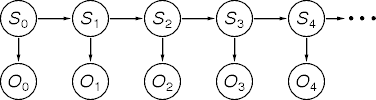
- pr (S0) specifies initial conditions.
- pr (St + 1 | St) specifies the dynamics.
- pr (Ot | St) specifies the sensor model.
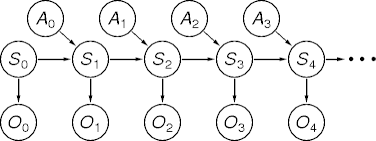
Localization Example
Sensor Model Example
- Pr Observe door | at door = 0.8
- Pr Observe door | not at door = 0.1
Example Dynamic Model
- Pr (loct + 1 = L | actiont = goRight \(\wedge\) loct = L) = 0.1
- Pr (loct + 1 = L + 1 | actiont = goRight \(\wedge\) loct = L) = 0.8
- Pr (loct + 1 = L + 2 | actiont = goRight \(\wedge\) loct = L) = 0.074
- Pr (loct + 1 = L' | actiont = goRight \(\wedge\)
loct = L) = 0.002 for any other location L'.
- Arithmetic modulo 16.
- The action goLeft is similar.
Combining Sensor Information
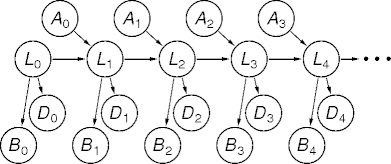
Lt robot location at time t
At robot action at time t
Dt door-sensor value at time t
Bt brightness-sensor value at time t
Summary
References
- Inference in Temporal Models (Chapter 15) in Artifical Intelligence, third edition, by Stuart Russell and Peter Norvig, Prentice Hall, 2010.
- Design and Implementation (Chapter 3) in The Practice of Programming by Brian Kernighan and Rob Pike, Addison Wesley, 1999.
| This page last modified on 2011 October 26. |
|
