Intelligent Systems Lecture Notes
12 October 2011 • Basic Planning
Outline
- Forward planning.
- Regression planning.
Planning
- Given a description of
- the effects and preconditions of agent actions,
- the initial world state,
- the goal state to achieve,
- find a sequence of actions that results in a state satisfying the goal.
Planning Goals
- A planning goal is a subset of features from the world model,
each with a specific value.
- Goal G = { f1 = v1, f2 = v2, … }
- Goal.features \(\subseteq\) World.features.
- A world state w satisfies a goal g if g is a
subset of w.
- g \(\subseteq\) w
- This includes features and values.
Forward Planning
- Haven't we solved this problem?
- Yes, we have.
- Search the state-space graph.
- Vertices represent the states.
- The edges from state s represent legal actions in state s.
- A plan is a path from the initial state to a state satisfying the goal.
Example
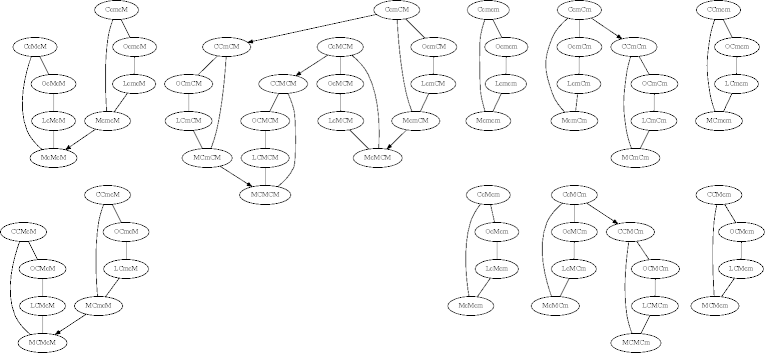
State-Space Vertices
- Each vertex in the state-space graph is a snapshot of the world.
- Vertex size is linear in world-feature count, which may be in the 100s.
- Vertex count grows exponentially with feature cardinality.
- How can these sizes be tamed?
- Important observation: adjacent vertices usually differ in a small
number of features.
- Why?
Delta Encoding
- Use delta encoding to represent a sequence of large objects
differing from each other by small amounts.
LO1, LO2, LO3, …
LO1, (LO2 - LO1), (LO3 - LO2), …- An old engineering trick (PCM, CVS).
- For state-space vertices, the differences are feature changes.
Delta-Encoding Example
- There's the benefit; what's the cost?
Observations
- Dealing with the whole world requires a possibly long, but usually
simple, calculation.
- Goal detection.
- Are two worlds the same (cycle detection)?
- Fortunately, delta encodings are themselves highly compressible.
- The search graph is constructed on demand, and only the reachable states.
Improving Search Efficiency
- Exploit domain knowledge to improve search efficiency.
- Use heuristics to improve choices.
- Compare the costs of moving clockwise and counter-clockwise to reach loc.
- Prune neighbors using domain knowledge.
- Just moved from X from Y? Don't move back to Y next.
- Use heuristics to improve choices.
Regression Planning
- Idea: search backwards from the goal description: vertices correspond
to subgoals, and edges to actions.
- Nodes are propositions: a formula made up of assignments of values to features.
- Edges correspond to actions that can achieve one of the goals.
- Neighbors of a vertex v associated with edge e specify what must be true immediately before e so that v is true immediately after.
- The start node is the goal to be achieved.
- goal(v) is true if v is a proposition that is true of the initial state.
Vertices and Edges
- Represent a vertex v as a set of value-variable assignments:
[ X1 = v1, …, Xn = vn ]
These are the assignments you want to hold. - The last action achieves Xi = vi and does not achieve Xj = vj' where vj' is different from vj.
- The neighbor of v along edge e must contain:
- The action A prerequisites.
- The elements of v not achieved by A.
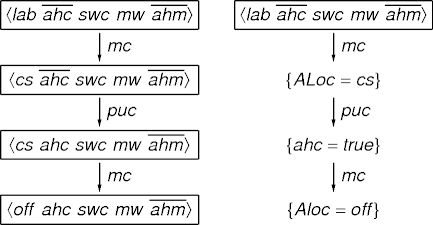
STRIPS Example
- \(\langle\)G, A, N\(\rangle\) where G = [ X1 = v1,
…, Xn = vn ] is an arc if
- Xi = vi is an effect of action A for some i.
- Xj = vj' and vj' \(\neq\) vj is not an action A effect.
- N is preconditions(A) \(\cup\) { Xk = vk : Xk = vk \(\not\in\) effects(A) } and N does not assign different values to any variable.
Regression Example
Find the Errors
Optimizations
- Goal G1 is simpler than goal G2 if G1 is a subset
of G2.
- It’s easier to solve [ cs ] than [ cs, ahc ].
- If you have a path to node N have already found a path to a simpler goal, you can prune the path N.
Improving Efficiency
- A heuristic function to estimate how difficult it is to solve the goal from the initial state.
- Domain-specific knowledge to remove impossible goals.
- It is often not obvious from an action description to conclude that an agent can only hod one item at any time.
Forward vs Regression Planning
- Which is more efficient depends on
- The branching factor.
- How good the heuristics are.
- Forward planning is unconstrained by the goal (except as a source of heuristics).
- Regression planning is unconstrained by the initial state (except as a source of heuristics).
Summary
References
- Planning in IS (Chapter 12) in Intelligent Systems by Robert Schalkoff, Jones and Bartlett, 2011.
- Classical Planning (Chapter 10) in Artifical Intelligence, third edition, by Stuart Russell and Peter Norvig, Prentice Hall, 2010.
- Planning (Chapter 15) in Knowledge Representation and Reasoning by Ronald Brachman and Hector Levesque, Morgan Kaufmann, 2004.
| This page last modified on 2011 October 9. |
|
